エントリー動画
2023年版
【05】「パンケーキガメ」(鳥羽商船高等専門学校 藤井研究室【skankα】)
◆メンバー紹介
情報機械システム工学科のPBLという授業で、2~5年生6名が参加しました。今年4月から手探りで製作を進め、規定コースを確実に周回できるロボットカーを仕上げることができました。
▼大脇彩都(5年生)ロボットカー制御プログラム(主にP制御による姿勢制御部分)と、ゴール後のLEDパネル表示を担当。GPSモジュールやLEDパネル、VoiceVox(ずんだもん)の音声関係の設定について事前調査を行い、メンバーが滞りなく作業を行えるように準備した。▼大野皓平(4年生 )コース走行用のプログラムを担当。動画のパワーポイント資料の作成や、VoiceVox(ずんだもん)の音声作成なども。▼澤田翔斗(4年生 )走行ログデータ取得、及び走行ログデータの解析による不具合点の検証を担当。▼磯田直利(4年生 )RTK-GPSの設定やロボットカーの電源管理、LEDパネル表示を担当。▼渡辺敦也(2年生)高専ロボコンの経験を活かし、設計製作、電装基板の設計製作を担当。▼大久保健太(2年生)部品製作や組み立てを担当。
◆一言アピール(動画のみ参加)
私たちが製作したロボットカーは、オムニホイールを使ったロボットカーです。車体の向きを変えずに全方向に移動することが可能なため、走行ルートを工夫することで単純な車体制御だけでもREIWAポイントを獲得する走行ができます。
また、路面の段差や砂利、強風などによって、走行ルートからずれそうな場合にはp制御による車体の向き補正を行い、走行ルートから大きく外れることを防いでいます。
外装は地元鳥羽水族館で飼育されているパンケーキリクガメです。パンケーキガメの左手に乗っているLEDパネルの表示がスタート前と走行中、ゴール後のアピール時で変化する所も見てほしいです。


【07】「平工J」(へいこうジェイ)(福島県立平工業高等学校 情報工学科)
◆一言アピール(動画のみ参加)
4月から課題研究の授業で取り組み、製作、プログラミングをしてきました。
何度も調整をして8の字を完走するまでになりました。本校の屋上に基準局が設置されていて、精度のよい位置情報が得られています。
卒業までにプログラムを手直ししてスムーズに走れる様にしたいと思っています。今回は初めての参加のため、8の字走行ができただけでとても満足しています。ポケットWifiやテザリングで調整をしていたので校外でインターネット環境を準備するのに苦労しました。
後輩に会場での走行を託したいと思います。楽しく取り組むことができました。
メンバー:山廼邊美咲・坂本涼雅・工藤涼太・鈴木拓弥


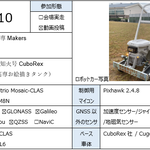
【10】「阿蘇不知火号Cuborex」(熊本高等専門学校)
◆一言アピール(動画のみ参加)
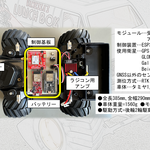
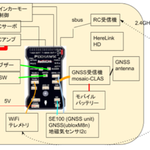
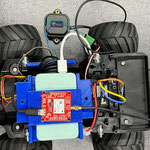
クローラー型のロボットカーCuboRex社のCugoV3にモルテンのレーザーライナーLiteを搭載して、グランドに白線を描くことができるようになっています。
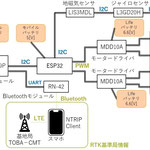
フライトコントローラのPixhawk 2.4.8を使っています。 これには加速度センサー・ジャイロセンサーが内蔵されておりIMUとしても機能します。GNSS受信機は1stとしてSeptentorioのMosaic-CLASを使っています。 2ndとしてubloxM8Nを使っています。モジュール内には地磁気センサーが搭載されており方位を取得します。
白石灰を排出するためにモータがあるので、そのモータのON-OFFもPixhawkで行います。
DroneBredgeESP32を使って,Wifi経由でノートパソコンと接続し、動作中のモニタリングが可能です。(熊本高専Makerチーム)
【02】「ゼロツー」(新居浜工業高等専門学校 安里研究室)
◆一言アピール
先輩の引継ぎを受けて去年のリベンジをするために参加しました。チームとしては 2 回目の参加ですが個 人としては初参加となります。GPS 単独測位を用いて、低コストで作りやすいをモットーに製作しました。構 成は去年と比べて大きな変化はありませんが、制御プログラムを工夫することにより安定して自動走行する
ことが増えてきています。
メンバー:石田航大、新谷玲士(安里光裕教授)


【03】「QueenBee」(名城大学理工学部メカトロニクス工学科機械情報システム研究室)
◆一言アピール
我々のロボットカーは,高精度な位置推定と正確性を兼ね備えた走行を実現することができます.
高精度な位置推定は,2周波RTKモジュールu-blox ZED-F9を用いることで実現可能.RTK測位を行い,fix解(オープンスカイの環境)を取得することができれば数cm程度の性能を確立.正確性を兼ね備えた走行は,ウェイポイント手法を用いることで実現可能.
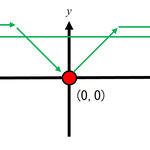
走行経路に対して細めなウェイポイントを設置・設定することで無駄なくシンプルな走行を確立.また,メインパイロン・サブパイロンを通り,走行時間ぎりぎりまで得点ポイントを量産する.
Meguro Labメンバー:新美大樹,田中冠成,黒田真琉,金森優次郎,深川備叶


【04】「網嶋号2023」(明治大学理工学部電気電子生命学科/網嶋研)
◆一言アピール
4月から卒業研究としてロボットカーコンテスト出場を目指していました。立ち上げの研究室だったため全てが0からのスタートであったため出場できるレベルまでもっていけるかとても不安でした。ハードの部分やプログラムの部分で沢山つまずきましたが様々な人の助けがあったおかげでなんとか八の字走行できるレベルまでもっていくことができました。出場するからには好成績を収めたいので、残り少ない時間ではありますが少しでも精度を上げられように頑張ろうと思います。
最後にアピールポイントは様々な人の助けによる思いが詰まっているところです!
メンバー:高島信之介 お手伝い:研究室のみんな

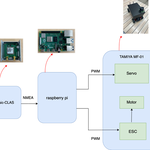

【09】「阿蘇不知火号CLAS 22改」(熊本高等専門学校)
◆一言アピール
Mosaic CLASを使って、 QZSS―CLASによるRTK―GNSS測位を利用します。ラジコンのモータをヨコモの17ターンに換装しました。 悪路でも大丈夫なようにしっかりと固定しています。
タミヤ 1/10RC XB スーパーファイターGR (DT-02シャーシ) / Pixhawk 2.4.8 / Septentrio Mosaic-CLAS (1st ) / ublox M8N (2nd GNSS)
フライトコントローラのPixhawk 2.4.8を使っています。 これには加速度センサー・ジャイロセンサーが内蔵されておりIMUとしても機能します。 GNSS受信機は1stとしてSeptentorioのMosaic-CLASを使っています。 2ndとしてubloxM8Nを使っています。モジュール内には地磁気センサーが搭載されており方位を取得します。
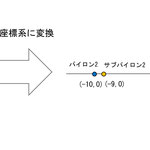
ゴールをアピールするにRCサーボがあるので、そのモータのON-OFFもPixhawkで行います。DroneBredgeESP32を使って,Wifi経由でノートパソコンと接続し、動作中のモニタリングが可能です。コース設置は、パイロン座標から自動で走行座標を計算するExcelファイルを使っています。走行実験を行なっていたら、真っ暗になってしまいました。(熊本高専Makerチーム)

2022年版
【01】Robox(サレジオ高専 情報通信工学研究室)
◆一言アピール(動画参加)
昨年のリベンジをするために参加しました。陸上競技の投擲補助システムについて研究しており、本来は円盤を運搬する車体となっています。男子用の円盤を2枚(約4[kg])まで搭載可能です。この車体は6輪であり、昨年出場した4輪車体とは違って安定性があります。また、回路部は小さなBoxに収まるようにまとめました。
【04】T○BA-MARU(鳥羽商船・賭場羅慈懇會)
◆一言アピール(動画参加)
メカナムホイールで全方向への移動や旋回が可能です。この特性を活かし、車体を同じ方向に向けたまま、平行移動でパイロンをクリアしていきます。外装は練習船「鳥羽丸」をモデルにしました。



【07】キャタピラはロマン
◆一言アピール(動画参加)
走破性能を重視しキャタピラを採用。mosaic CLAS対応受信機を搭載し、みちびきから補正信号を受け取ることで、低コストで高精度測位を実現しています。
5人・日(1人で)で仕上げた超低コストマシンです。
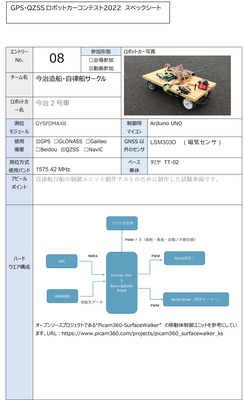
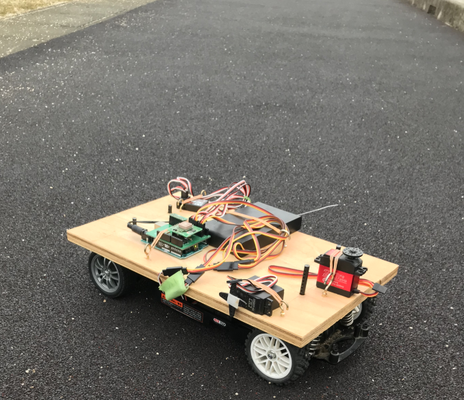
【08】今治2号車(今治造船自律航行船サークル)
◆一言アピール(動画参加)
私たちは造船会社のサークル活動として自律航行船の競技会びわ湖クルーレス・ソーラーボート大会 に出場しています。 本動画の「今治2号車」は、自律航行船の航法システムの陸上試験用として制作したものそのままですが、調整の末20m間隔のパイロンを回れるようにはなりました。 (2022/10/10)マイコンやGPSユニットを換装した高精度バージョンを鋭意制作中です。
【12】Leafony-GH1(計画工学研究所)
◆一言アピール(動画参加)
ベースの車体になるべく部品を実装する事を目標とし、CLASによる単独測位で走行させた。 Tamiyaグラスホッパーを、モータ、ESCとステアリングサーボもそのまま使用。 フライトコントローラ(FC)はPixRacerを使いArduRoverをインストール そのパラメータ調整は、Futabaの受信機をFCに接続し、T10JプロポとPCにて行った。 GNSSはArduSimple社のuBlox ZED-F9P搭載ボードにD9Cボードを組み合わせ、ヘリカルアンテナでQZSS-L6も含めて受信した。 F9P受信ボードをLeafonyシステムと連携してWiFi経由でRTK方式も利用可能。
【15】MJ 2022(名城大学/メカトロニクス工学専攻)
◆一言アピール(動画参加)
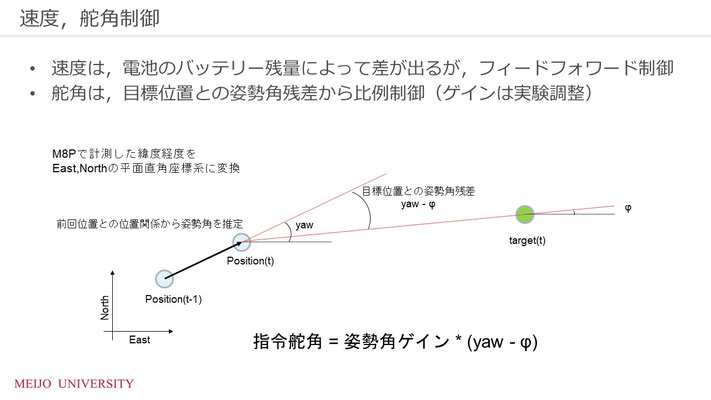
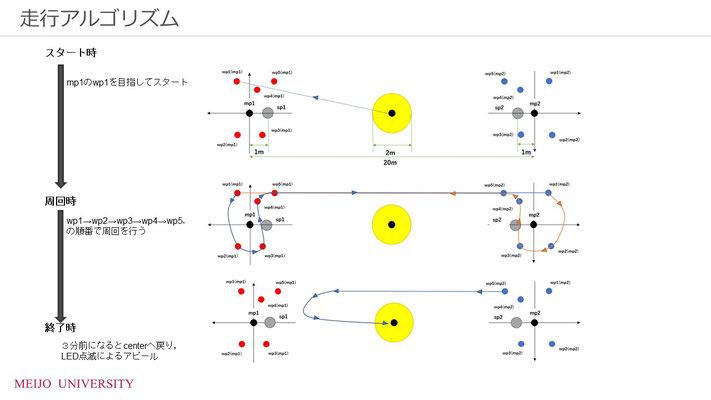
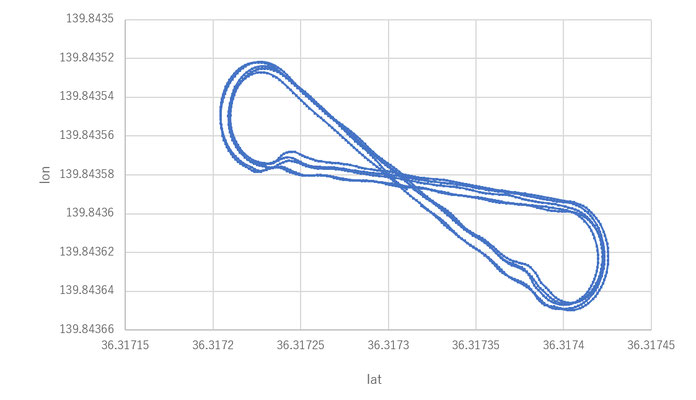
今回は加点ポイントを確実に取得することを目標に,RTKモジュール(M8PによるRTK測位結果)による制御を行うロボットカーにしました.その為,REIWAポイントの獲得,走行終了時の停止位置によるボーナスポイント,競技終了合図のヘッドライト(赤)の点滅に注目をしてほしいです.また,今回の撮影は公共の場所で行ったため,安全面にも考慮を行い,自動運転モードとマニュアルモードの切り替えをコントローラーで行えるようにしていることやRaspberry Pi4用のケースを3Dプリンターにより作成も行いました.


会場参加(海洋大グラウンドで実走予定)チームの走行動画
【02】阿蘇不知火号CLAS2022(熊本高専・チームD on D音)
◆一言アピール(会場参加)
熊本高専のチームD on D音のGNSSグループが作ったロボットカー「阿蘇不知火号CLAS2022」を自動走行で試走させて見ました。
2022/10/13この時点では、mosaic CLASは使わず, GPSだけの単独測位です。 GPSはRadiolinkのSE-100(ublox M8N)を使いました。
(パソコンのテレメトリ画像では、Mosaic CLASが測位したロボットカーの位置が正確に表示されるのですが、AHRS の表示が消えずに Autoモードになりませんでした。)
【03】CTO γ-type(小山高専CTO)
◆一言アピール(会場参加)
先輩の引継ぎを受け3度目の出場です。昨年度はCTEを用いた軌道修正制御が導入され目標経路に沿った走行が可能となりました。本年度は制御プログラムの修正とハードウェアの大幅な更新をしました。プログラム上に存在した不明なエラーの解消、ループ処理の追加等により8の字を複数回周回ができるようになりました。また、F9Pと2周波対応アンテナになり測位データは正確に、レートは10Hzに調整したため高速走行も可能です。

【05】 Ben2系こだま号(愛知総合工科高 専攻科)
◆一言アピール(会場参加)
チーム名:Ben2Panda
マイコンボードやGNSSレシーバなどの構成部品をボディーの中に完全に収納できる構造にしました。(見た目を良くするため。)また、scilab/xcosによるモデルベース開発手法を用いて制御プログラムを開発しました。
【06】ZERO ONE(新居浜高専・安里研)
◆一言アピール(会場参加)
初心者ですが気合だけはあります! 衛星測位に詳しい方、いろいろおしえてください!
ベース車両:タミヤ模型の1/10RC スーパーファイターGR
測位モジュール:u-blox 7シリーズ(GPS単独測位)
制御用マイコン:PIXHAWK 2.4.8
【09】arend-F (Team Katy)
◆一言アピール(会場参加)
TeamKatyは爆走をポリシーに参加させていただいています。会場で2回走行できれば、そのうちの1回は爆走してみたいと考えています。 演算用にM5Stack Core2を採用し外部センサだけではなく、スイッチ類も撤廃しました。 その分配線も少なく故障リスクが 少なくなっています。 GPSモジュールもセプテントリオ社のMOSAIC-X5を新規採用し、RTK測位を行いながら50mS周期で取り込んでいます。
【11】無限廻車(奈良高専チーム)
◆一言アピール(会場参加)
初めての出場です。これまで出場したいと興味があった大会ですが、GNSS受信機の価格を見て諦めていました。
この度、GNSS受信機の価格が下がってきて、さらにプレゼンをして学校から予算を頂けることとなったので、出場することにしました。 マイコンはArduino Due、受信機はNEO-D9C、NEO-F9Pです。そのほかは予算節約のために過去に作ったロボットのあまりパーツを使うようにしました。 車体はMDF板による自作で、超信地回転をすることができます。小回りが利くため、制御が簡単です。動画撮影は間に合いませんでしたが、練習ではREIWAポイントの獲得にも成功しました。
GPSモジュール名:Ublox NEO-D9C、ZED-F9P
制御装置:Arduino Due
使用衛星:GPS、GLONASS、Galileo、Beidou、QZSS、NaviC
測位方式:CLAS
衛星測位以外のセンサ:LSM303AGR
車体:MDF板での自作
【14】CTO ν-type(小山工業高等専門学校2)
◆一言アピール(会場参加)
今年は新たに芝生の上で走ることが出来るオフロードタイヤを搭載した車体を製作し、それに加え高精度なアンテナ(ANN-MB-00)と受信機(ZED-F9P)を導入しました。これにより測位データが正確になりました。 また制御プログラムは先輩の引継ぎを受け、プログラム上のエラーを解消し、ループ処理の追加等により8の字を複数回周回することが出来るようになりました。 これらにより高速かつ安定した走りを目指します。
モジュール…アンテナ:ANN-MB-00 受信機:F9P
制御装置…Raspberry Pi4 B
使用衛星…GPS,GLONASS,Galileo,Beidou,QZSS
GNSS以外のセンサ…なし
測位方式…RTK:L1/L2
車体…タミヤ MF-01 X