越中島サーキット2024
2024年10月16日掲載
※青字は特記事項
※赤字は2024年からの変更点
1. 概要
決められた時間内に、学内の指定されたコースを周回することにより得られるポイントを競う。
2. ロボットカーのハードウェアレギュレーション
≪ロボットカーの動力≫
原則として電動とする。
≪ロボットカーの航法センサー≫
・主な航法センサーとしてGNSS受信機を搭載し、制御プログラムに従い、自律的に走行するものであること。使用するGPS受信機やマイコンは、一般に市販されている製品を利用することが望ましいが、特に制限しない。
・GNSS受信機以外に使用してよいセンサーは、ジャイロセンサー・地磁気センサーのみとする。ただし、本コンテストの趣旨に逸脱しない範囲であれば他のセンサーを許可することがあるので、大会事務局に問い合わせること。
・リエゾン区間を除き、競技中の競技中の遠隔操作は不可とし、すべての自律制御部(ハードウェア/ソフトウェアともに)がロボットカーに搭載されていなければならない。ただし、ロボットカーの状態をモニタリングするために外部への通信を行うことはできる(この場合、遠隔操作をしていないことを主審に対して説明できること)。
・RTK-GNSSのおよびCLASなどの補正情報の利用は可能。東京海洋大学で運用する基準局がネットワークで配信されている。
独自に基準局とそれを伝送するための無線通信を確保も可能。 大会運営側で無線通信やWifiなどの提供しない。
≪ロボットカーの寸法≫
次のいずれかを満たすこと。
1.競技中の姿勢での高さが400mm以下,幅が500mm以下,奥行きが500mm以下であること
2.ロボットを分解して鞄に入れて運ぶ際、鞄のサイズの3辺の合計が115cm以内でかつ55cm×40cm×25cm以内(鞄については各競技者が用意する。なお、このサイズは、国内線航空機内(100席以上)に持ち込みできる大きさを参考にしている。)
寸法がこれを超えるロボットカーはカテゴリー2として参加は可能とする。採点は行うが、しかし、表彰での上位からは除外する。
特別賞の授与はある。
≪ロボットカーの重量≫
合計で9kg以下であること。これには自律走行に必要なすべての機器の重量が含まれるが、セットアップ時のみ接続して競技中は取り外す機器(ノートパソコンやバッテリー充電器等)は除く。
重量がこれを超えるロボットカーも参加は可能とする。採点は行うが、しかし、表彰での上位からは除外する。
特別賞の授与はある。
≪補足≫
競技場を壊したり、人を傷つけたりする恐れのあるロボットカー等については、大会事務局の判断で、走行を認めない。
3. 競技場
東京海洋大学越中島キャンパス 越中島会館周辺の構内道路
一周が100mから150m程度のアスファルト・コンクリート路面の道路に作られた周回路。
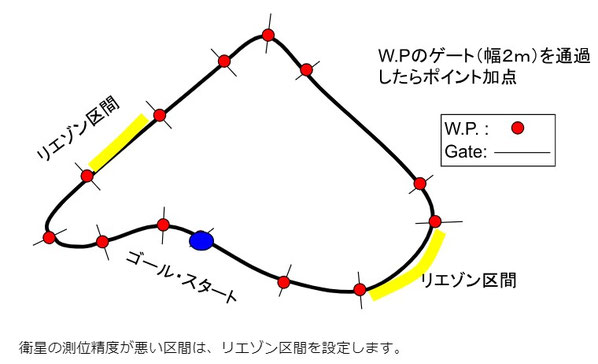
周回路上にはロボットの通過を確認するためのゲートが複数個所置かれる。
周回路は、反時計回りに周回する。
ゲートは、
4. 競技の流れ
主審より準備の指示を受けたら、競技者はロボットカーをスタート地点に置く。スタート地点におけるロボットカーの向きは任意である。競技者は準備ができたらスタートできることを主審に伝える。
≪競技時間≫
競技時間は、3分とする。主審がスタートの宣言をしたら、タイムキーパーは競技時間の計測を開始する。競技時間内であれば、何度でも競技を行う事ができる。ただし、参加台数によっては、競技時間を短くしたり、複数回の試技を認めたりする場合もある。
≪走行ルール≫
- ロボットカーは、GNSS測位を利用して自律走行し、周回路を反時計回り方向に回ること。ゲートを通過毎にポイントが加算される。
- ロボットカーが、コースアウトしそうなときには、救済措置として人手を使ってコースに(5回まで)戻すことができる。
- RTKの測位精度が劣化が予想される個所については、リエゾン区間を設定し、人手によるサポートを認める。リエゾン区間で減点はなしとするが、サポートなしで通過した場合にはポイントが加算される。
- ロボットカーが、メインパイロン周回ポイントを獲得した上で、競技時間内にセンターサークル内(外周の線に触れていればよい)に停止してアピールするとボーナスポイントが加算される(競技時間内にアピールが開始されればよい)。ただし、停止してアピールした時点で、競技は終了となる(競技時間が残っていても以降の得点は認めない)。ボーナスポイントの獲得を目指すこと自体は必須ではない(競技時間中に∞に回り続けるという動作でも構わない)。

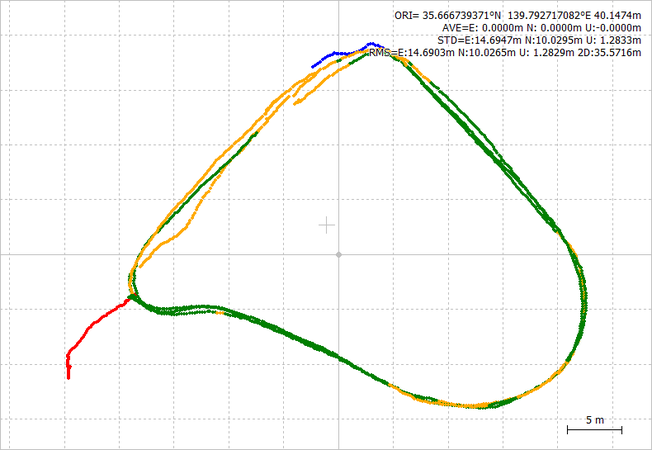
コースをRTK測位した自動車で3周した時の測位結果の軌跡
(赤は単独測位、緑はRTK-Fixed、黄色はRTK-Floatの状態)
サブパイロン

5. リトライおよび救済措置
≪リトライ≫
競技時間内であれば、競技者は何度でもリトライを宣言することができる。リトライは、競技者が主審に対して宣言し、それを主審が認めたときに適用される。リトライが認められた場合、それまでのすべての得点が無効になる。競技者は再度ロボットカーの調整などを行う事ができるが、競技時間はリトライによってリセットされない。準備が整い次第、競技者は主審に再スタートを宣言し、主審の許可を得た後、ロボットカーをスタート地点から再スタートさせることができる。
≪救済措置≫
救済措置とは、ロボットカーが障害物を避ける事ができずに競技場内で立ち往生した場合に、競技者が障害物を移動させたり、ロボットカーの向きを変えたりすることができる措置を言う。競技者が主審に対して救済措置の適用を宣言し、それを主審が認めるときに適用される。救済措置が認められた場合、それまでのポイントはリセットされない。救済措置の適用は5回までとする。ロボットカーの向きを変えるのは、競技者自身がロボットカーをその場で回転させて進行方向を変えたり、パイロン等の障害物を動かしたりすることができる。パイロン等を移動したときはロボットカーの通過後にすみやかに元の場所に戻すこと。
≪競技終了≫
競技時間内であれば、競技者は競技終了の宣言をすることができる。競技者が主審に対して競技終了の適用を宣言し、それを主審が認めるときに適用される。競技終了が認められた場合、それまでに得ていた得点が適用される。再スタートはできない。
4.6. 加点および減点
走行競技は、コースを周回する速さを競い、競技終了時での合計ポイントを得点とする。競技者が主審に救済措置を申告し、ロボットカーや障害物に触れた場合は、合計ポイントから減点をする。
≪ウェイポイントゲート通過ポイント≫
ウェイポイントゲートを時点で10点を加点する。
≪周回ポイント≫
越中島サーキットコースを周回すると、50点を加点する。
≪REIWAポイント≫
検討中です。
(検討案の例)実行委員会側で指定した区間の走行タイムが速い順で、REIWAポイントを加算する。
≪ボーナスポイント≫
周回ポイントを獲得した上で、競技時間内にスタート地点に停止してアピールすると、50点を加点する。
≪減点≫
救済措置を適用した場合は、1回につき5点を合計ポイントから減点する。
≪リエゾン区間≫
リエゾン区間では、GNSS測位精度が劣化してコースアウトする恐れがある場合に、人手でサポートしても減点しない。
人手を加えずに自律走行した場合には、20点を加点する。
リエゾン区間の設定は、当日のGNSS測位の状況を確認の上、設定する。