2016大会要項
2016年5月8日掲載 測位航法学会
2016年5月23日修正 測位航法学会
2016年7月26日修正 測位航法学会
2016年10月6日修正 測位航法学会
2016年10月14日修正 測位航法学会
2016年10月16日修正 測位航法学会
※青字は2015大会からの変更点、及び、特記事項
※赤字は前回修正日からの変更点
1. 開催趣旨
このコンテストは、GPSおよびQZSS(準天頂衛星システム)を利用する研究者や技術者の相互交流、ならびに大学や高等専門学校等の学生に対する衛星測位に関する基礎技術の修得機会の提供及び技術交流を目的として開催する。
2. 競技概要
衛星測位しながら自律走行するロボットカーで競技する。以下の2種類の競技を行う。
-
ダブルパイロンレース
2つのWaypointを周回することにより得られるポイントを競う -
QZSSスクランブル アプリコンテスト(新競技)
大会事務局が用意したロボットカーを、参加者が作成したAndroidアプリで制御して、指定されたルートを走行し、走行時間の短さを競う
(Andorid端末は大会事務局が用意する)
「ダブルパイロンレース」、「QZSSスクランブル アプリコンテスト」のどちらか一方、もしくは両方に参加することができる。
希望者は「参加申込み」ページより、2016年10月15日(土)までに申し込むこと。
※競技の見学のみも大歓迎です!(見学のみは申し込み不要)
3. 競技日時/会場
3.1. 競技日時
2016年10月23日(日) 13時~16時
3.2. 競技会場
3.3. 当日スケジュール
10:00〜12:50 エントリー受付
・車検、写真撮影、走行順番の決定
・開会式までは会場を利用して試走可能
13:00〜13:20 開会式
13:30〜15:30 競技
・ダブルパイロンレース(1チーム競技時間3分)
・QZSSスクランブル アプリコンテスト(1チーム競技時間3分)
15:30〜16:00 バッファタイム
・希望者は、再走も可能
16:10〜16:30 閉会式

会場の様子

会場わきにある建物を、荷物置き場・開発スペースとして解放
4. ダブルパイロンレース ルール
2つのWaypointを周回することにより得られるポイントを競う。
4.1. 参加資格
競技規定に合致するロボットカーを作成することができ、当日、競技に参加できる個人または団体。所属学校組織や企業の別を問わない。一般個人や小中学生の参加も歓迎する。
4.2. ロボットカーのハードウェアレギュレーション
≪ロボットカーの動力≫
原則として電動とする。
≪ロボットカーの航法センサー≫
・主な航法センサーとしてGPS受信機を搭載し、制御プログラムに従い、自律的に走行するものであること。使用するGPS受信機やマイコンは、一般に市販されている製品を利用することが望ましいが、特に制限しない。ただし競技者に当日ヒアリングし、GPS受信機の情報提供してもらう予定。希望者にはBluetoothとUSBでの接続が可能な受信機QZPODを貸与する。
・東京海洋大学に設置されている基準局のRTK補強情報をWiFi配信する。競技者は自由に利用してよい。詳細は大会事務局にお問い合わせください。
・GPS受信機以外に使用してよいセンサーは、ジャイロセンサー・地磁気センサーのみとする。
・競技中の遠隔操作は不可とし、すべての自律制御部(ハード/ソフトともに)がロボットカーに搭載されていなければならない。ただし、ロボットカーの状態をモニタリングするために外部への通信を行うことはできる(この場合、遠隔操作をしていないことを主審に対して説明できること)。
≪ロボットカーの寸法≫
次のいずれかを満たすこと。
1.競技中の姿勢での高さが400mm以下,幅が500mm以下,奥行きが500mm以下であること
2.ロボットを分解して鞄に入れて運ぶ際、鞄のサイズの3辺の合計が115cm以内でかつ55cm×40cm×25cm以内(鞄については各競技者が用意する。なお、このサイズは、国内線航空機内(100席以上)に持ち込みできる大きさを参考にしている。)
≪ロボットカーの重量≫
合計で9kg以下であること。これには自律走行に必要なすべての機器の重量が含まれるが、セットアップ時のみ接続して競技中は取り外す機器(ノートパソコンやバッテリー充電器等)は除く。
≪補足≫
競技場を壊したり、人を傷つけたりする恐れのあるロボットカー等については、大会事務局の判断で、走行を認めない。前回大会では参加可能だったドローンは、改正航空法により本大会では不可とする。
4.3. 競技場
≪Waypoint≫
Waypointの数は2つとし、その間隔は20m程度とする。正確な座標値は、大会当日に発表する。Waypointの中心には目印が設定され、例えばパイロンを予定しているが、形状についてはこの限りではない。パイロン等に衝突しても失格にはならないが、ロボットカーはこれを回避することが望ましい。パイロンは主審がWaypointの通過を判断するための目印として置かれたものであり、これらをナビゲーションの目印にすることは大会の主旨から外れるため不可とする。ロボットカーの衝突等によりパイロン等が移動した場合でも、それらの元の位置をWaypointとする。パイロン等の目印は、Waypointだけ置かれるとは限らず、Waypoint以外の場所にも置く事がある(競技エリアの境界線の表示など)。
≪スタート地点≫
2つのWaypointを結ぶ直線の真ん中の点上とする。
4.4. 競技の流れ
主審より準備の指示を受けたら、競技者はロボットカーをスタート地点に置くこと。スタート地点におけるロボットカーの向きは任意である。競技者は準備ができたらスタートできることを主審に伝える。
≪競技時間≫
競技時間は、3分とする。主審がスタートの宣言をしたら、タイムキーパーは競技時間の計測を開始する。競技時間内であれば、何度でも競技を行う事ができる。ただし、参加台数によっては、競技時間を短くしたり、複数回の試技を認めたりする場合もある。
≪パイロンの回り方≫
ロボットカーは、自律走行により∞の様に回ること。主審は、Waypointの通過によるポイントを判定する。記録係は、主審の判定に従ってポイントを記録する。∞の周り方はどちらでも構わない。また、交差する地点はWaypoint間であればどこでもよい。

4.5. リトライおよび救済措置
≪リトライ≫
競技時間内であれば、競技者は何度でもリトライを宣言することができる。リトライは、競技者が主審に対して宣言し、それを主審が認めたときに適用される。リトライが認められた場合、それまでのすべての得点が無効になる。競技者は再度ロボットカーの調整などを行う事ができるが、競技時間はリトライによってリセットされない。準備が整い次第、競技者は主審に再スタートを宣言し、主審の許可を得た後、ロボットカーを再スタートさせることができる。
≪救済措置≫
救済措置とは、ロボットカーが障害物を避ける事ができずに競技場内で立ち往生した場合に、競技者が障害物を移動させたり、ロボットカーの向きを変えたりすることができる措置を言う。競技者が主審に対して救済措置の適用を宣言し、それを主審が認めるときに適用される。救済措置が認められた場合、それまでのポイントはリセットされない。救済措置の適用は5回までとする。ロボットカーの向きを変えるのは、競技者自身がロボットカーをその場で回転させて進行方向を変えたり、パイロン等の障害物を動かしたりすることができる。パイロン等を移動したときはロボットカーの通過後にすみやかに元の場所に戻すこと。
≪競技終了≫
競技時間内であれば、競技者は競技終了の宣言をすることができる。競技者が主審に対して競技終了の適用を宣言し、それを主審が認めるときに適用される。競技終了が認められた場合、それまでに得ていた得点が適用される。再スタートはできない。
4.6. 得点および減点
走行競技は、ダブルパイロン(2つのWaypoint)を正確に往復する回数と、コースを走行する速さを競い、競技終了時での合計ポイントを得点とする。競技者が主審に救済措置を申告し、ロボットカーや障害物に触れた場合は、合計ポイントから減点をする。
≪得点≫
Waypointの周囲を180度回った時点で、得点10点を獲得する。右回りと左回りについての違いはない。2つのWaypointを通過した後にWaypoint間の中心線を通過した時点で1往復と見なし、さらに10点を獲得する。
≪減点≫
救済措置を適用した場合は、1回につき5点を合計ポイントから減点する。

4.7. 表彰
上位入賞者には記念品として以下のものを贈呈する。
・G-SHOCK(アプリコンテストと合わせて10個程度) アイサンテクノロジー株式会社提供
・フライトコントローラー(アプリコンテストと合わせて2個程度) おとなラジコン提供
・2016年産コシヒカリ 10kg(優勝)/5kg(準優勝) 岩城農場提供
5. QZSSスクランブル アプリコンテスト ルール
大会事務局が用意したロボットカーを、参加者が作成したAndroidアプリで制御して、指定されたルートを走行し、走行時間の短さを競う(Andorid端末は大会事務局が用意する)。
5.1. 参加資格
競技規定に合致するAndroidアプリを作成することができる個人または団体。所属学校組織や企業の別を問わない。一般個人や小中学生の参加も歓迎する。事前に大会事務局へAndroidアプリを提供できれば、当日、競技会場に来場しなくてもよい(来場しない参加者を想定し、当日は動画配信を行う)。
5.2. 大会事務局が提供するハードウェア
大会事務局はロボットカーとAndroid端末を本レースに提供する。
①ロボットカー
≪ハードウェア構成≫
TAMIYA製ラジコンカーをベースとした車体を、Arduino互換ボード2枚で制御する。Androidアプリとの通信はBluetoothシリアル通信で行い、ロボットカーの位置情報と制御コマンドを送受信する。GPSモジュールはU-blox NEO-M8Tを使用し、GPS/QZSS、GLONASS、BeiDouを同時並行受信する。
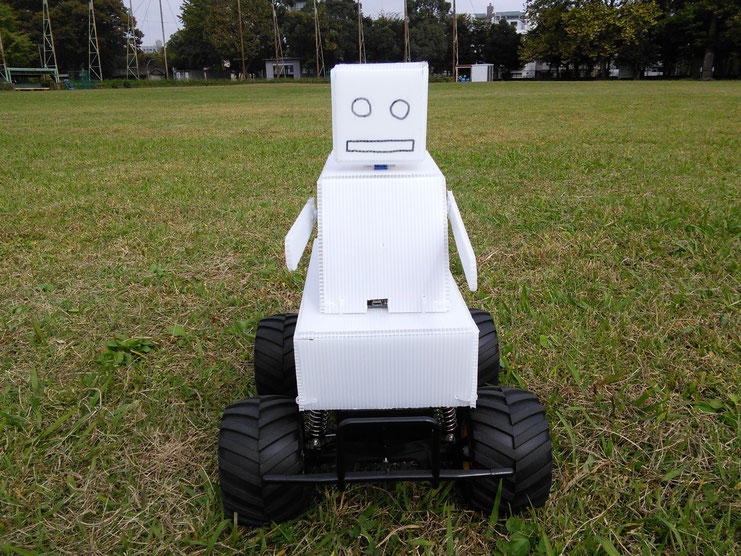
ロボットカー外観

ロボットカーハードウェア構成
≪送受信データ≫
ロボットカーはBluetoothのシリアル通信にて、以下のテキストデータを送受信する。
◆ロボットカーからの出力データ (テキストデータ)
|
出力データ |
備考 |
|
・緯度(ddmm.mmmm) ・経度(dddmm.mmmm) ・ロボットカー前方の北からの角度(時計回りの角度)(小数点以下2桁) |
・ロボットカーは1秒に1回左記3データを改行で区切り、まとめて送信する。 ・データの例 Lat:3539.9441 Lon:13947.6272 Deg:12.34 |
◆ロボットカーの制御コマンド(テキストデータ)
|
コマンド |
ロボットカーの動作 |
|
g |
スタートのアピールをする (ロボットカーはこのコマンドを受信しないと他のコマンドを受け付けません。誤動作防止対策です。) |
|
s |
停止する |
|
a |
前進する |
|
p |
ゆっくり前進する |
|
R |
大きく右に曲がる |
|
r |
小さく右に曲がる |
|
L |
大きく左に曲がる |
|
l |
小さく左に曲がる |
|
1 |
停止して、1番目のターゲットユニットに到着したことをアピールする |
|
2 |
停止して、2番目のターゲットユニットに到着したことをアピールする |
|
3 |
停止して、3番目(最後)のターゲットユニットに到着したことをアピールする (ロボットカーはこのコマンドを受信すると、再度’g’コマンドを受信するまで他のコマンドを受け付けません。誤動作防止対策です。) |
|
e |
緊急停止する (ロボットカーはこのコマンドを受信すると、再度’g’コマンドを受信するまで他のコマンドを受け付けません。誤動作防止対策です。) |
②Android端末
Nexus7(2013)
Androidバージョン6.0.1
5.3. 競技場
≪コート≫
3m四方のユニットが7×7ならんだグリッドをコートとする。各ユニットの位置は(Am,Bn)(m,nは1~7)で指定する。コンテスト当日に(A1,B1)、(A7,B1)、(A1,B7)の中心座標を大会事務局より公表する。
≪スタートユニット≫
スタートユニットは(A1,B1)とする。

5.4. Androidアプリのレギュレーション
≪ロボットカーとの通信方式≫
Bluetoothで接続し、シリアル通信でデータを送受信すること。
≪ユーザーインターフェース≫
以下のユーザーインターフェースでAndroidアプリを実装すること。

≪提出方法&期限≫
10月21日(金)23時59分までに、アプリのapkファイルを大会事務局へメールにて送付すること。(大会1ヵ月程度前に行う予定の試走会に参加する場合は、その前日の23時59分までに、アプリのapkファイルを大会事務局へメールにて送付すること。)大会事務局のメールアドレスは申込時に通知する。
5.5. 競技の流れ
1.主審がスタートユニット内へロボットカーを置き電源を入れる。
2.大会事務局が、Nexus7(2013)インストールしてある参加者作成のAndroidアプリを起動し、(A1,B1)、(A7,B1)、(A1,B7)の中心座標と、3か所のターゲットユニットをAndroidアプリに入力する(指定されるターゲットユニットは各レースにより異なる)。AndroidアプリとロボットカーをBluetooth接続する。(Nexus7は大会本部に置かれる。)
3.主審がスタートの宣言をしたら、大会事務局はAndroidアプリのスタートボタンを押下し、タイムキーパーは競技時間の計測を開始する。
4.Androidアプリはスタートボタンを押されたら、ロボットカーへ’g’コマンドを送信する(ロボットカーはスタート準備したことをアピールする)。Androidアプリはロボットカーから1秒おきに受信する位置情報をもとに各ターゲットユニットを目指してロボットカーを制御する。
5.ロボットカーがターゲットユニットに到着したら、Androidアプリはロボットカーへ到着したことをコマンド送信する(ロボットカーはターゲットユニットに到着したことをアピールする)。Androidアプリはターゲットユニットで5秒間停止してから、次のターゲットユニットに向けてロボットカーを制御すること。
9.主審がスタートの宣言をしてから、ロボットカーが3番目のターゲットユニットに到着してアピールが完了するまでを走行時間とする。制限時間は3分間とする。
10.制限時間内に3番目のターゲットユニットに到着できなかった場合はその時点で競技を終了する。この場合走行時間は3分とする(別途次に示す罰則時間が加算される)。

5.6. 罰則時間の加算
以下の場合は罰則時間を加算する。罰則時間は主審が判定する。
・ターゲットユニット到着のアピールが不十分であった場合(停止が5秒未満等)
・ターゲットユニット外で到着のアピールがあった場合(罰則時間はターゲットユニットからの距離に応じる。ターゲットユニットにロボットカーの一部でも接している場合はターゲットユニット内にあるものとみなす)
・制限時間内に3番目のターゲットユニットに到着できなかった場合
・暴走等により、主審が救済措置を行う判断をした場合

5.7. 表彰
上位入賞者には記念品として以下のものを贈呈する。来場しなかった入賞者には後日発送する。
・G-SHOCK(アプリコンテストと合わせて10個程度) アイサンテクノロジー株式会社提供
・フライトコントローラー(アプリコンテストと合わせて2個程度) おとなラジコン提供
・2016年産コシヒカリ 10kg(優勝)/5kg(準優勝) 岩城農場提供
5.8. 注意事項
・来場しない参加者を想定し、当日は動画配信をおこなう。
・参加者多数の場合は、試走会で予選を行うこともある。
・時刻により衛星配置が変化するため、測位精度も変化するが、特別な調整は行わない。
・アプリの開発環境・実行環境の構築を含む本コンテストの応募に係る諸費用は、応募者の負担とする。
・同一応募者による複数アプリの応募は不可とする。
・アプリのインストール時に不必要なパーミッション(権限)の要求があると大会事務局が判断した場合は、走行を認めないことがある。
6. 再走
全ての競技者の競技が終了した後、時間に余裕がある場合は、ダブルパイロンレース、QZSSスクランブル アプリコンテスト、ともに再走を認める。再走した場合は最も良い結果を採用する。
7. 試走会
詳細は「試走会」ページ参照。
8. その他
1.当日の天候や開場の状況によっては、コンテストが中止される場合もある。中止の判断は、大会事務局が行う。競技のルールに不備な点などが認められた場合は、追加のルール等について主審と大会事務局の合議で決める。
2.結果発表および順位の決定は、当日の競技直後に行う。